第9名解决方案
首先,我要感谢主办方组织了一场激动人心的比赛。
在这里,我介绍一下我的解决方案。
我的解决方案利用了通过多普勒频移预测的车辆速度,这基本上比基线位置更可靠。
1. 利用多普勒频移预测速度
车辆的速度可以使用 PseudorangeRateMetersPerSecond 来估计,如下所示:
https://www.kaggle.com/c/google-smartphone-decimeter-challenge/code
2. 通过CNN进行平滑
将一个简单的一维卷积网络应用于预测的速度进行平滑处理。
3. 在基线中提取可靠点
我根据速度和相对位置之间的一致性,在基线中提取了可靠点。
如果满足以下条件,基线中的连续点将被分组:
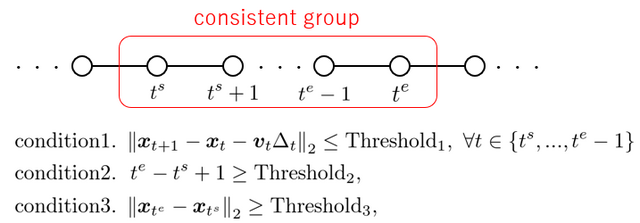
其中:
- xt:时间索引 t 处的基线位置,
- vt:时间索引 t 处的速度,
- ts, te:一致组起点和终点的时间索引,
3. 对一致组应用吸附网格(Snap-to-grid)(仅限SJC)
对一致组应用吸附网格。
网格点是通过真实值的线性插值生成的。
为了避免吸附到道路的另一侧,将车辆的方向角度添加到每个网格点。
通过解决以下优化问题获得最佳网格点:
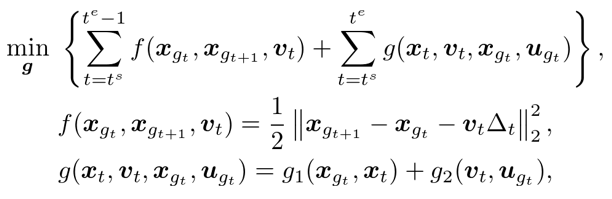
其中:
- gt:xt 吸附到的网格点的索引,
- ugt:与网格点处车辆方向角度对齐的单位向量。
g(xt, vt, xgt, ugt) 的第一项是与基线位置和网格点之间距离相关的成本。
g(xt, vt, xgt, ugt) 的第二项是速度方向角度与网格点方向角度偏差的成本。
上述优化问题可以使用 Dijkstra 算法求解。
4. 基于速度的插值
一致组中的基线位置是固定的。
通过固定它们,对一致组之间的点施加了边界条件。
为了满足边界条件,通过解决以下优化问题来修改速度:
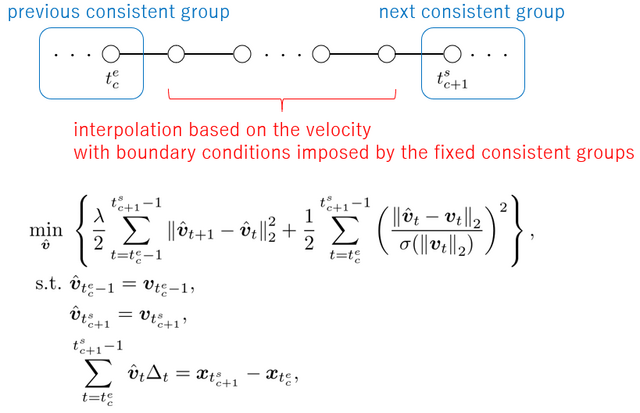
其中:
- \sigma(|vt|) 是取决于 vt 范数的标准差,这是使用训练集估计的,
- t^{e}_{c}:第 c 个一致组的终点时间索引,
- t^{s}_{c+1}:第 (c+1) 个一致组的起点时间索引。
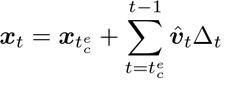
然后,一致组之间的位置插值如下:
5. 对插值点应用吸附网格(仅限SCJ)
对插值点应用吸附网格的方式与一致组几乎相同(边界条件已修改)。
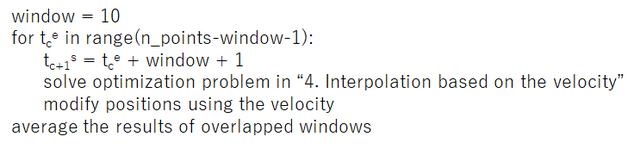
6. 基于速度的平滑
通过迭代求解“4. 基于速度的插值”中的优化问题对位置进行平滑,如下所示:
7. 集成
- 我使用了多种条件来生成一致组并将它们平均。
- 同一集合中的手机位置以相同的权重进行平均。
8. 结果
训练集: 2.331 / 公榜: 3.758 / 私榜: 2.597
9. 遗留问题
- 使用 IMU 数据减少速度的预测误差。
- 检测停止点并将它们收缩为一点以减少累积误差。
虽然一致组施加的边界条件减少了累积误差,但停止点可能会对速度插值造成