第10名解决方案
感谢 Kaggle 和主办方举办了一场精彩的比赛。
概述
- 预测噪声,
噪声 = 真实值 - 基线,类似于计算机视觉中的去噪任务。 - 使用速度
latDeg(t + dt) - latDeg(t)/dt作为输入,而不是绝对位置,以防止模型在训练数据集上过拟合。 - 利用短时傅里叶变换(STFT)生成 2D 图像输入,然后使用 ImageNet 卷积神经网络。
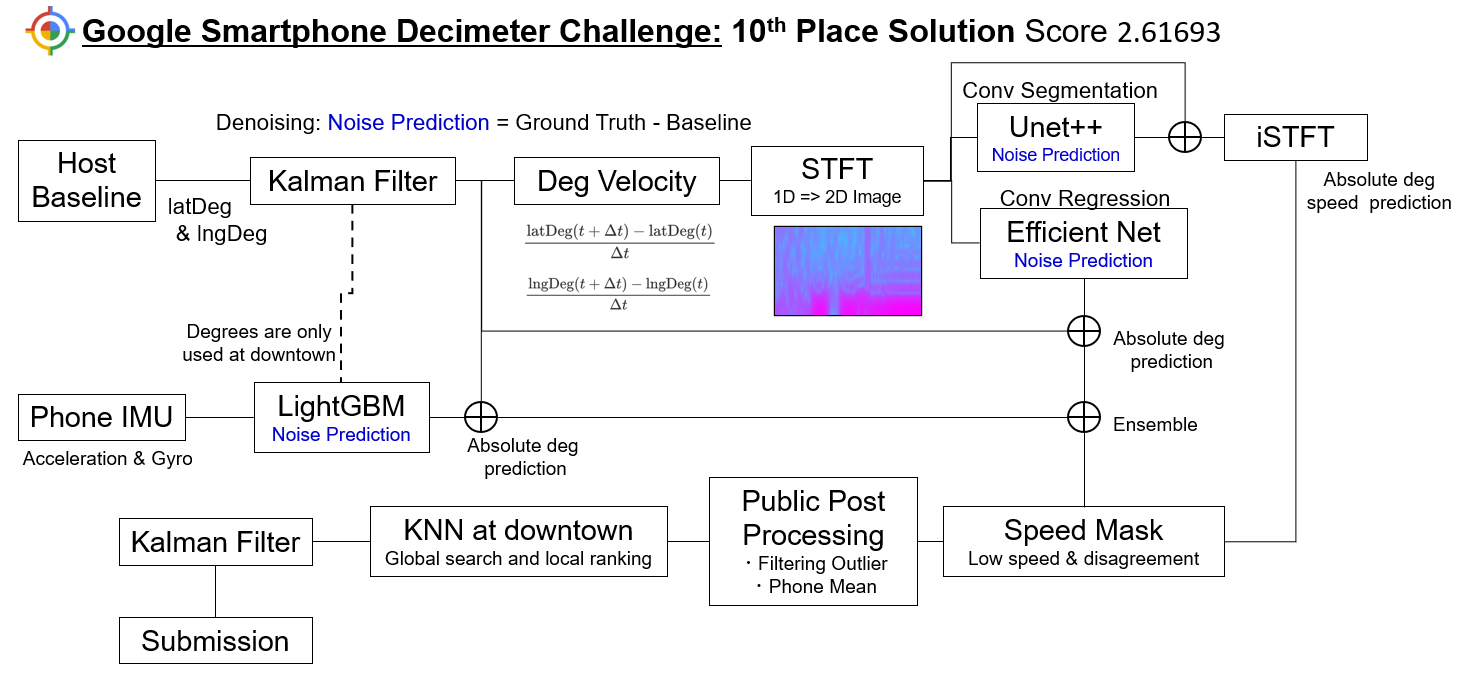
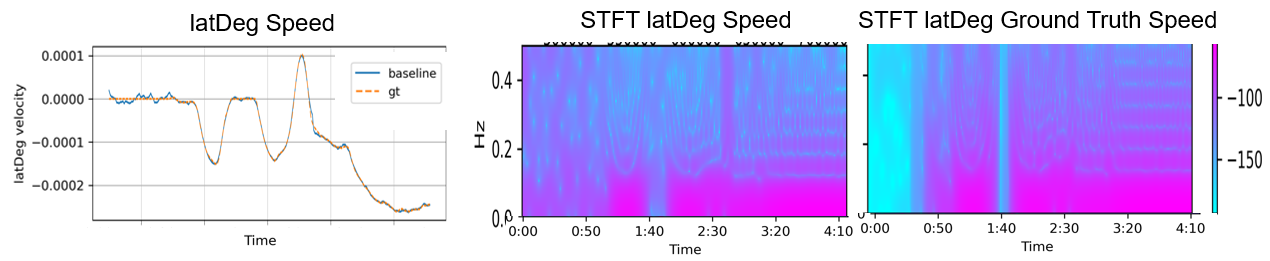
STFT 和卷积网络部分
- 输入:使用 librosa 为 latDeg 和 lngDeg 的速度生成 STFT。
- 每个手机序列被分割成 256 秒的序列,然后使用
n_tft=256、hop_length=1和win_length=16进行 STFT,结果为每个度数生成 (256, 127, 2) 的特征。以下 2D 图像由 1D 序列生成。
- 每个手机序列被分割成 256 秒的序列,然后使用
-
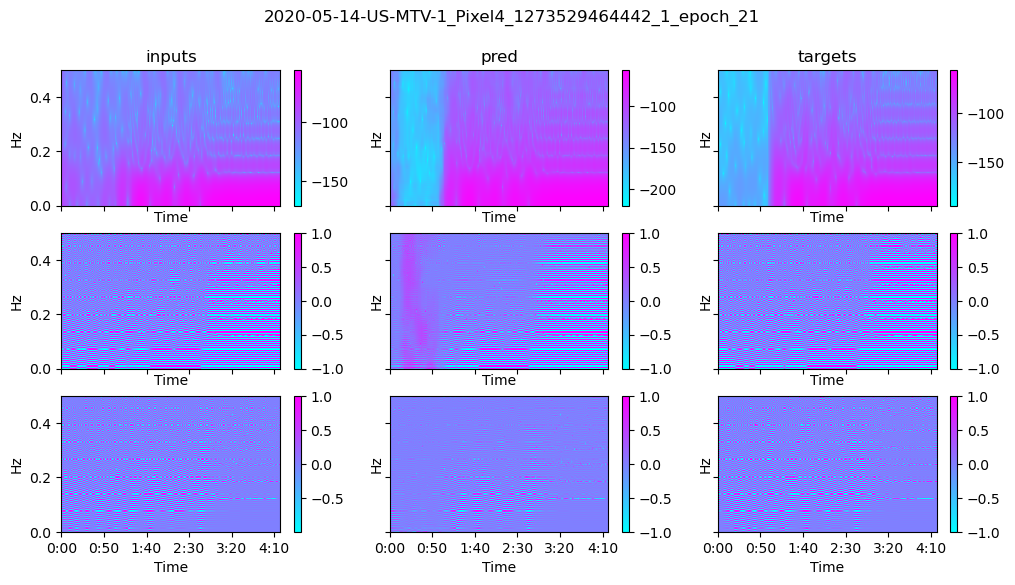
模型:回归和分割
- 回归:EfficientNet B3,预测 latDeg 和 lngDeg 噪声。
-
分割:带有 EfficientNet 编码器的 Unet++ (segmentation pytorch),预测 STFT 噪声。
- 分割预测 + 输入 STFT -> 逆 STFT -> latDeg 和 lngDeg 速度的预测
-
该速度预测用于:
- 低速掩码:低速区域的点被替换为其中位数。
- 速度不一致掩码:如果来自位置预测的速度与此速度预测差异很大,则移除这些点并进行插值。
-
分割预测示例。

LightGBM 部分
- 输入:排除磁场特征的 IMU 数据
- 同时排除 y 轴加速度和 z 轴陀螺仪数据,因为受手机安装条件影响。
- 添加移动平均作为附加特征,
window_size=5, 15, 45。
- 预测 latDeg 和 lngDeg 噪声。
公开后处理部分
公开笔记本中有一些不错且有效的后处理(PP)方法。我使用了以下笔记本。感谢所有作者。