第18名方案
祝贺所有的获奖者,非常感谢主办方举办了如此有趣的比赛!
这次比赛对我来说非常艰难,下面我将分享我们的解决方案。
概览
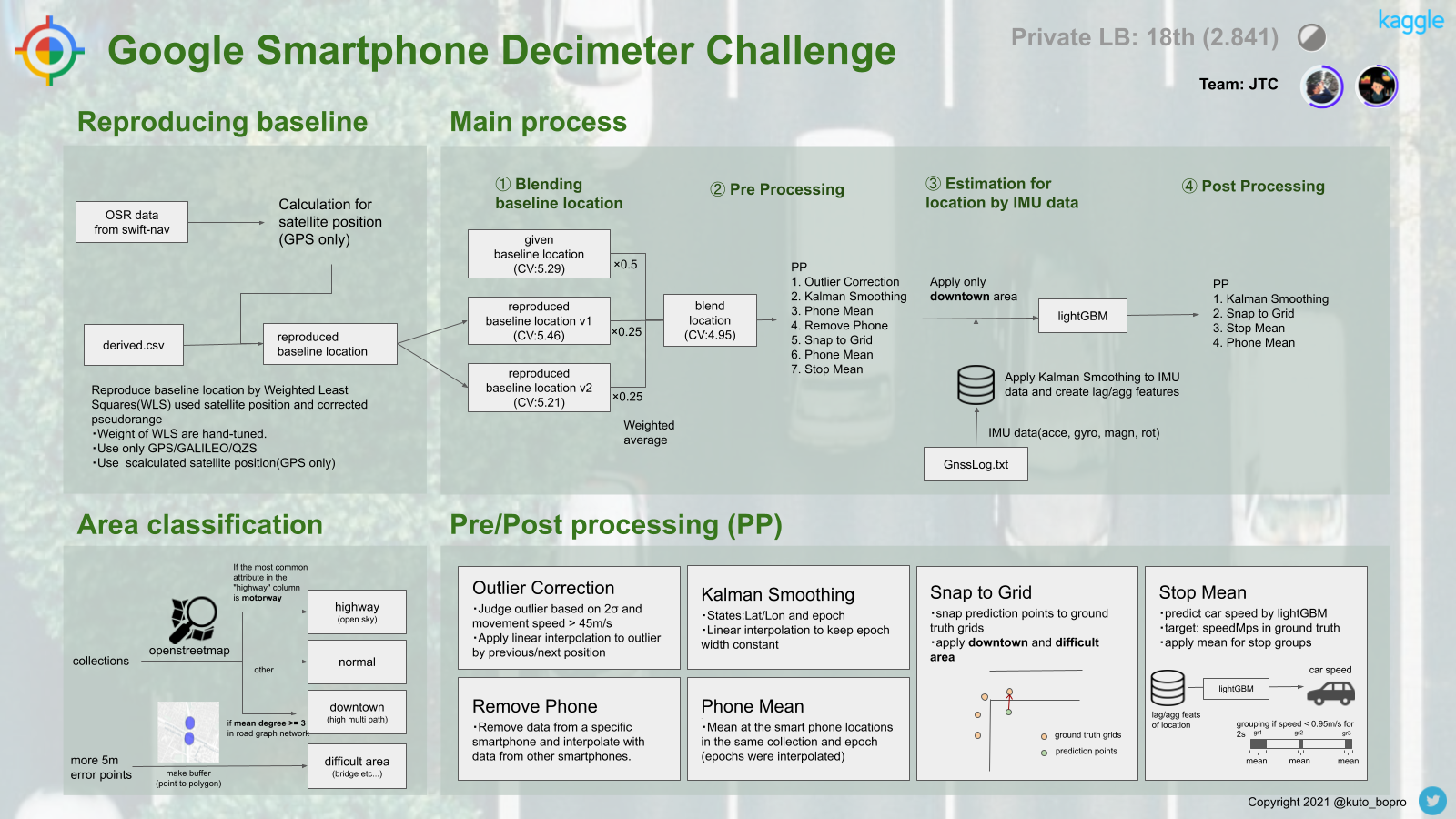
1. 复现基线
在这次比赛中,主办方分享了一个使用WLS(加权最小二乘法)的基线(仅结果文件)。为了复现它,我们利用派生文件重新构建了基线。虽然很难完全复现一模一样的结果,但我们能够创建出分数相当的基线,并决定将它们与原始基线文件进行融合。
我们参考了这个Notebook:
https://www.kaggle.com/hyperc/gsdc-reproducing-baseline-wls-on-one-measurement
以下是我们创建基线所做的一些工作:
- 使用OSR数据计算卫星位置(仅GPS)(但效果不明显)
- 仅使用GPS/GALILEO/QZS数据(其他卫星信号质量不好)
- 手动调整WLS的权重 (x**2 + 3x)
在使用上述方法创建了两个新的基线位置后,我们通过与原始基线进行加权平均来融合它们。
2. 区域分类
我们自动将数据集分为三类(与公开版本一致),并额外定义了一个“困难区域”。
困难区域的定义如下:
- 对训练数据进行预处理
- 提取误差超过5米的点
- 通过对每个点应用缓冲区将点转换为多边形
- 将这些多边形区域定义为困难区域
定义的困难区域如下图所示:
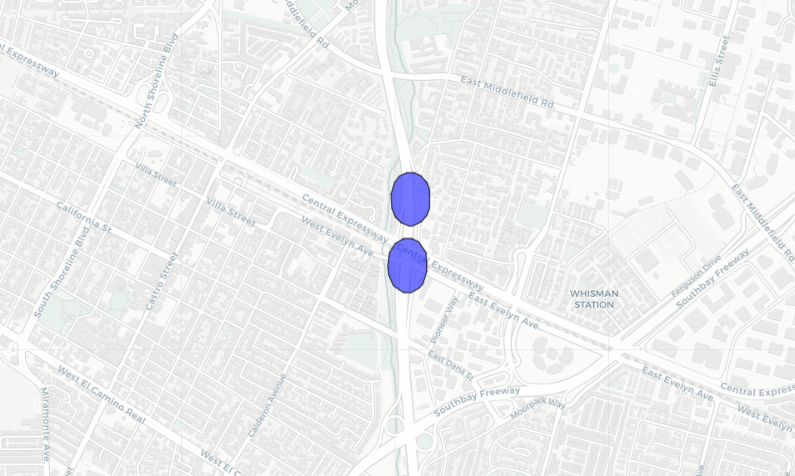
这被用于“吸附到网格”步骤。
3. 预处理/后处理
我们使用了一些分享的Notebook,非常感谢贡献者。
异常值校正
https://www.kaggle.com/dehokanta/baseline-post-processing-by-outlier-correction卡尔曼平滑
https://www.kaggle.com/emaerthin/demonstration-of-the-kalman-filter
我们应用线性插值来保持时间间隔恒定。手机均值
https://www.kaggle.com/t88take/gsdc-phones-mean-prediction
https://www.kaggle.com/bpetrb/adaptive-gauss-phone-mean移除手机
https://www.kaggle.com/columbia2131/device-eda-interpolate-by-removing-device-en-ja吸附到网格
我们仅在市中心区域和困难区域应用了吸附到网格。停止均值
我尝试对停止点取平均值。
步骤如下:
(1) 使用LightGBM预测车速
- 目标:ground_truth.csv 中的 speedMps
- 特征:
- 位移范围在 -30 ~ 30 的滞后特征(位置、时间、速度等)
- 聚合特征
(2) 如果预测结果小于 0.95m/s 且持续超过 2 �