第10名方案(简要总结)
首先,我要感谢 Kaggle 工作人员和组织者组织了这场非常实用且具有挑战性的比赛。
我们的团队在私人排行榜上排名第 10。
概览
解决方案总结如下。
关键点
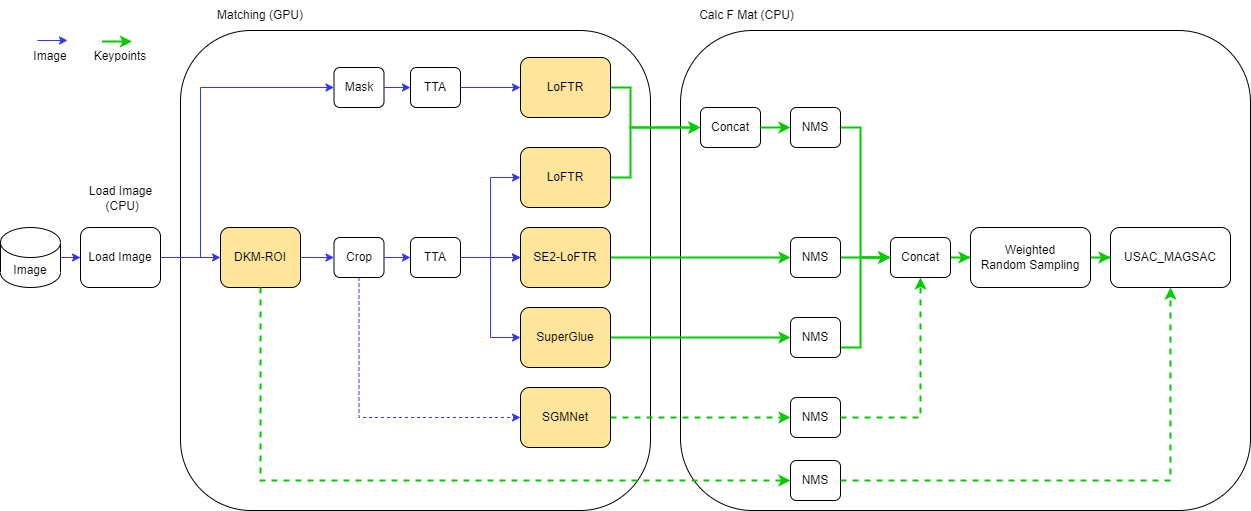
- 使用 DKM-ROI 进行集成
- 实现更快、更好的估计
- 异常值处理
- 信任 CV(交叉验证)
使用 DKM-ROI 进行集成
DKM 在我们的实验中表现出稳健的趋势。它几乎总能找到很多对应点,但与另一种算法相比,其峰值性能有所不足。
基于这种趋势,我们将 DKM 视为“平均击球手”。并在后续步骤中利用它制作裁剪图像作为 ROI(感兴趣区域)。
- 使用 DKM 进行推理,并使用 Otsu 方法计算置信度阈值
- 使用计算出的阈值过滤对应点
- 利用过滤后的对应点制作边界框
- 从边界框区域裁剪图像
- 与 LoFTR、SE2-LoFTR 和 SuperGlue 进行集成
DKM-ROI 提取 ROI 的样本结果如下所示:
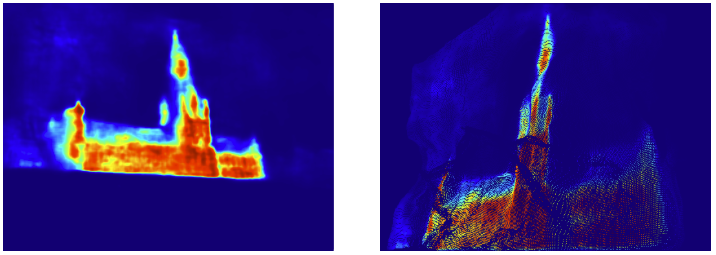
图 1:DKM 确认的点的置信度图
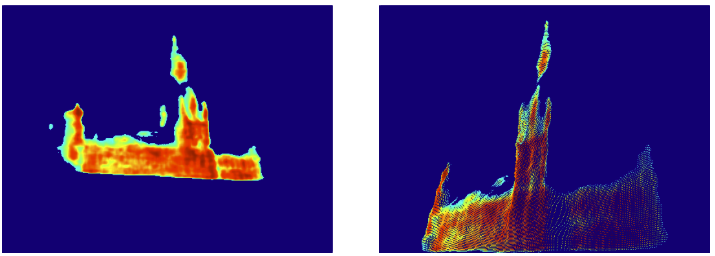
图 2:通过 Otsu 方法对置信度图进行二值化的结果
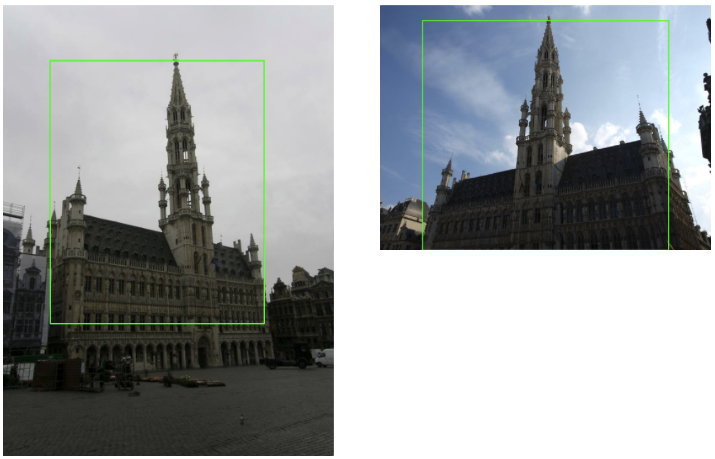
图 3:原图上对应点的边界框
基本上,与 DKM-ROI 的集成效果很好。它让寻找关键点变得更容易。但有时它会遗漏重要区域。针对此问题的一个简单对策是,我们的方案不仅与 DKM-ROI 集成,还使用 LoFTR 对原始图像进行推理并将其加入集成。
实现更快、更好的估计
与往常一样,本次比赛的重点之一是以某种方式增加推理时间。我们方案的典型思路如下:
- 流水线处理:
- 我们将整体流程优化为多线程实现。它可以描述为三个组件:1. 预处理(如加载图像),2. 推理(如匹配器),3. 后处理(如 RANSAC)。我们的方案运行多线程来并行处理这些任务。特别是对于本次比赛中的任务,流水线非常有效,因为 GPU 处理和 CPU 处理承载着不同的进程。
- 关键点 NMS (非极大值抑制):
- 检测到的关键点通常是有噪声且冗余的。这会增加计算时间。为了避免这个问题,我们对关键点使用了 NMS 算法,名为 SSC (Suppression via Square Covering,方形覆盖抑制)。SSC 可以在保持精度的同时减少处理时间。
- 加权随机采样:
- 出于同样的原因,我们试图以一种能够保持估计精度的方式减少输入到 RANSAC 的关键点数量。作为一种方法,我们将 DKM 中使用的加权随机采样算法应用于关键点集成结果。
异常值处理
本次比赛的输入图像预期非常多样化。
在困难的情况下,例如无纹理、距离较远和视角非常不同,简单集成的效果有限,因为几乎找不到对应点。因此,针对这些应被称为异常值的图像对,采取了以下措施。
- 异常情况 1: 当找到的对应点数量